
ESP8266, DHT22 (temperature & humidity), MAX4009 (luminance).
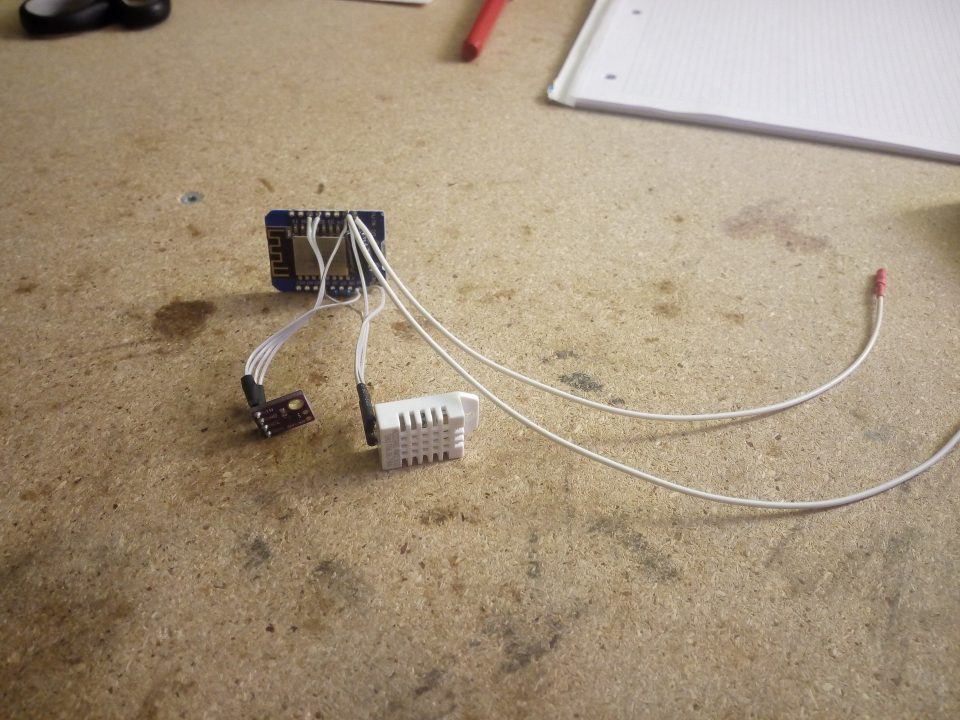
Supply Voltage: approx 3.3V – 5.4V (eg, LI-PO, USB)

Sensors close-up.

Published MQTT topics to OpenHAB.
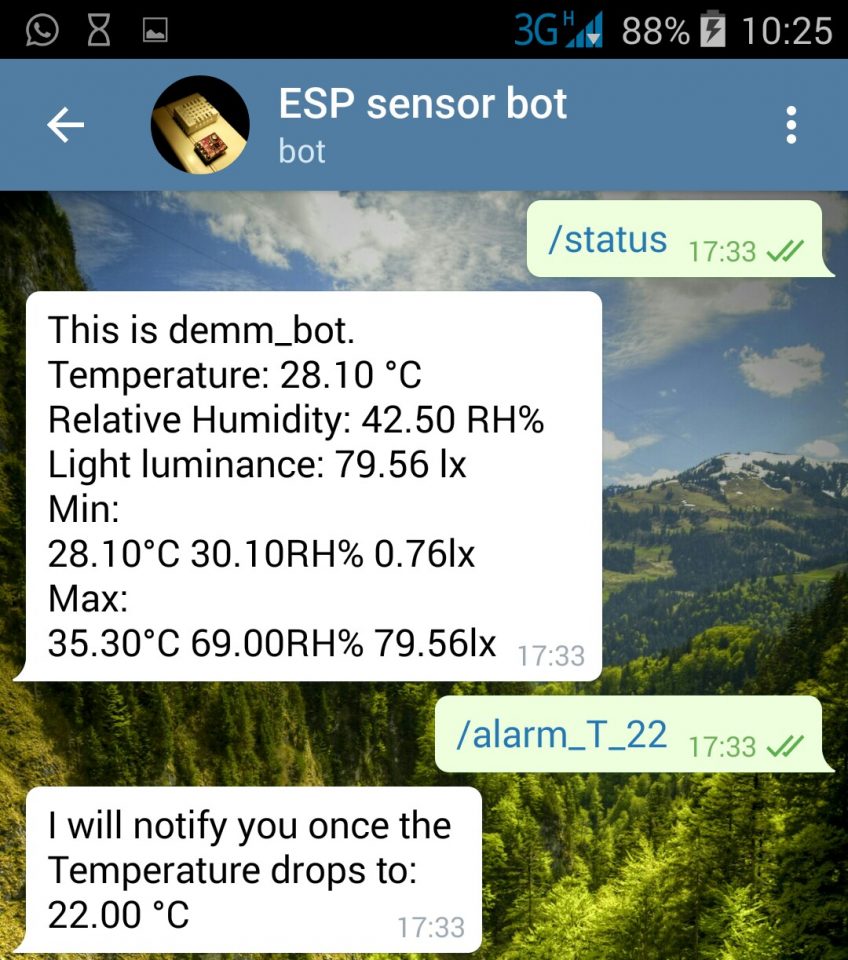
Telegram message with Temperature, Humidity and Luminance.

Technical info and notification Thresholds.
[code language=”cpp”]
/*
Author: Dejan Lauber
Date: 9.2017
File: mqtt_sensor_bot.ino
Version: V1.5
Description:
sensor bot with
dht22 temp & humidity
max44009 ambient light
input voltage:
ca.3.3V – max.5.4V
mqtt pub:
demm_bot/updateID
demm_bot/lux
demm_bot/T
demm_bot/RH
demm_bot/vin
telegram bot with customizable bot token.
pinout:
A0 voltage divider to 5V/Vin (gnd|100k|ADC|220k|A0|220k|5V/Vin)
D0
D5 DHT22 data (ext 10k pullup)
D6 1/EN_deepsleep
D7
D8
D1 SCL gy-49 max
D2 SDA gy-49 max
D3
D4
todo:
*/
//libraries
#include <ESP8266WiFi.h> //https://github.com/esp8266/Arduino
#include <EEPROM.h>
//wifi manager
#include <DNSServer.h>
#include <ESP8266WebServer.h>
#include <WiFiManager.h> //https://github.com/tzapu/WiFiManager
//max44009
#include <Wire.h>
//dht22
#include <SimpleDHT.h>
//mqtt
#include <PubSubClient.h>
//telegram
#include <UniversalTelegramBot.h>
//pin definitions
const byte DHTPIN = D5; // Pin which is connected to the DHT sensor.
//const byte EN_deepsleep = D6;
//library variables
const int maxaddr = 0x4A;
int Bot_mtbs = 1000; //mean time between scan messages //1000
long lastBOT; //last time messages’ scan has been done
//other library stuff
WiFiClient espClient;
PubSubClient mclient(espClient);
SimpleDHT22 dht22;
WiFiClientSecure bclient;
UniversalTelegramBot *bot;
//program variables
const word MQTT_INTERVAL = 15000;
const word LTH_INTERVAL = 2500;
const byte authNumber = 10;
word lowvoltage = 3300;
byte preReq, lowvoltagesent;
long lastMQTT, lastLTH, lastMC;
word updateID = 1, vin[3] = {6000, 0, 0};
//min, current, max
float luminance[3] = {420000, -127, -127};
float temperature[3] = {420, -127, -127};
float humidity[3] = {420, -127, -127};
//user struct. "id" is loaded from eeprom
struct authObj {
String id;
float TT; //temperature threshold
byte TD; //direction of thershold; 0: off; 1: if temp<TT; 2: if temp>TT
float RHT;
byte RHD;
float luxT;
byte luxD;
float vinT;
byte vinD;
};
authObj auth[authNumber]; //id: 52bit (arduino max 32bit) -> string ;_; (max 16 chars) = 170 bytes
//config struct
struct confObj {
byte en; //the enable/valid byte
char mqtt_server[40];
char mqtt_port[6]; //5 chars + 1 string end char
char BOTtoken[47]; //46 chars
}; //max 94 bytes
confObj conf = {
42,
"192.168.11.44",
"1883",
"xxxxxxxxx"
};
void setup() {
//pinMode(EN_deepsleep, INPUT_PULLUP);
Serial.begin(9600);
EEPROM.begin(768);
//reset eeprom auth. for testing puposes
//EEPROM.write(0, 255);
if (EEPROM.read(0) == conf.en) {
Serial.println("reading valid EEPROM");
EEPROM.get(0, conf);
//total 17, 4, 1, 4, 1, 4, 1, 4, 1, +reserved = 42
//.id
for (byte j = 0; j < authNumber; j++) {
for (byte i = 0; i < 17; ++i) {
char tmp = char(EEPROM.read(100 + (42 * j) + i));
if ((tmp == ‘\0’) || (tmp == 255)) {
i = 17;
}
else {
auth[j].id += tmp;
}
}
//Serial.println(auth[j].id);
//.TT float 4 byte
EEPROM.get(100 + (42 * j) + 17, auth[j].TT);
//.TD 1 byte
EEPROM.get(100 + (42 * j) + 21, auth[j].TD);
//.TT float 4 byte
EEPROM.get(100 + (42 * j) + 22, auth[j].RHT);
//.TD 1 byte
EEPROM.get(100 + (42 * j) + 26, auth[j].RHD);
//.TT float 4 byte
EEPROM.get(100 + (42 * j) + 27, auth[j].luxT);
//.TD 1 byte
EEPROM.get(100 + (42 * j) + 31, auth[j].luxD);
//.TT float 4 byte
EEPROM.get(100 + (42 * j) + 32, auth[j].vinT);
//.TD 1 byte
EEPROM.get(100 + (42 * j) + 36, auth[j].vinD);
}
} else {
Serial.println("config not found on EEPROM, using defaults");
for (byte j = 0; j < authNumber; j++) {
EEPROM.write(100 + (42 * j), 255);
EEPROM.write(100 + (42 * j) + 21, 0);
EEPROM.write(100 + (42 * j) + 26, 0);
EEPROM.write(100 + (42 * j) + 31, 0);
EEPROM.write(100 + (42 * j) + 36, 0);
}
EEPROM.commit();
}
//Max44009
Wire.begin();
Wire.beginTransmission(maxaddr);
Wire.write(0x02);
Wire.write(0x40);
Wire.endTransmission();
delay(300);
//WiFiManager
WiFiManager wifiManager;
//reset settings – for testing
//wifiManager.resetSettings();
//sets timeout until configuration portal gets turned off
wifiManager.setTimeout(180);
// id/name, placeholder/prompt, default, length
WiFiManagerParameter custom_mqtt_server("server", "mqtt server", conf.mqtt_server, 39);
wifiManager.addParameter(&custom_mqtt_server);
WiFiManagerParameter custom_mqtt_port("port", "mqtt port", conf.mqtt_port, 5);
wifiManager.addParameter(&custom_mqtt_port);
WiFiManagerParameter custom_bot_token("token", "telegram bot token", conf.BOTtoken, 46);
wifiManager.addParameter(&custom_bot_token);
//fetches ssid and pass and tries to connect
if (!wifiManager.autoConnect()) {
Serial.println("failed to connect and hit timeout");
delay(3000);
//reset and try again, or maybe put it to deep sleep
ESP.restart();
delay(5000);
}
//if you get here you have connected to the WiFi
Serial.println("wifi connected…");
//custom parameters from wifimanager
strcpy(conf.mqtt_server, custom_mqtt_server.getValue());
strcpy(conf.mqtt_port, custom_mqtt_port.getValue());
strcpy(conf.BOTtoken, custom_bot_token.getValue());
//safe config
EEPROM.put(0, conf);
EEPROM.commit();
//mqtt
mclient.setServer(conf.mqtt_server, atoi(conf.mqtt_port));
mclient.setCallback(callback);
//bot
bot = new UniversalTelegramBot(conf.BOTtoken, bclient);
}
void getlux() {
unsigned int data[2];
Wire.beginTransmission(maxaddr);
Wire.write(0x03);
Wire.endTransmission();
// Request 2 bytes of data
Wire.requestFrom(maxaddr, 2);
// Read 2 bytes of data luminance msb, luminance lsb
if (Wire.available() == 2)
{
data[0] = Wire.read();
data[1] = Wire.read();
}
// Convert the data to lux
int exponent = (data[0] & 0xF0) >> 4;
int mantissa = ((data[0] & 0x0F) << 4) | (data[1] & 0x0F);
luminance[1] = pow(2, exponent) * mantissa * 0.045;
}
void getdht() {
temperature[1] = -127;
humidity[1] = -127;
int err = SimpleDHTErrSuccess;
if ((err = dht22.read2(DHTPIN, &temperature[1], &humidity[1], NULL)) != SimpleDHTErrSuccess) {
Serial.print("Read DHT22 failed, err="); Serial.println(err);
}
}
byte reconnect() {
String msg;
Serial.print("Attempting MQTT connection… ");
// ATttempt to connect
if (mclient.connect("ESP_demm_bot")) {
Serial.println("connected");
// Once connected, publish an announcement…
msg = String(updateID);
mclient.publish("demm_bot/updateID", msg.c_str());
// … and resubscribe
//client.subscribe("teapot/pottingphase");
lastMQTT = millis();
}
return mclient.connected();
}
void callback(char* topic, byte* payload, word length) {
//no subscribed mqtt topics
}
void handleNewMessages(int numNewMessages) {
Serial.print("handleNewMessage: ");
//Serial.println(String(numNewMessages));
byte is_auth;
String msg;
for (int i = 0; i < numNewMessages; i++) {
String chat_id = String(bot->messages[i].chat_id);
String text = bot->messages[i].text;
Serial.println(text);
String from_name = bot->messages[i].from_name;
if (from_name == "") from_name = "Guest";
is_auth = 0;
for (byte j = 0; j < authNumber; j++) {
/*
//debug
Serial.println(j);
Serial.println(chat_id);
Serial.println(chat_id.length());
Serial.println(int(chat_id[9]));
Serial.println(auth[j].id);
Serial.println(auth[j].id.length());
Serial.println(int(auth[j].id[9]));
Serial.println(int(auth[j].id[10]));
*/
if (chat_id == auth[j].id) {
is_auth = 1;
j = authNumber;
}
}
if (!is_auth) {
Serial.println("unauthorized");
if ((text == "/status") || (text == "/start") || (text == "/help")) {
//msg = "ESP sensor bot\n";
msg = "This is demm_bot.\n";
msg += "This Chat ID is: " + chat_id + "\n\n";
msg += "/status : Get this Message\n";
msg += "/test : Get Test Messages";
bot->sendMessage(chat_id, msg, "");
}
if (text == "/admin_xxxx") {
//add chat_id to conf.auth_ids
for (byte j = 0; j < authNumber; j++) {
if (auth[j].id == "") {
auth[j].id = chat_id;
//Serial.println(j);
//Serial.println(auth[j].id);
//Serial.println(auth[j].id.length());
for (byte i = 0; i < chat_id.length() + 1; ++i) {
EEPROM.write(100 + (42 * j) + i, chat_id[i]);
}
EEPROM.commit();
is_auth = 1;
text = "/help"; //respond with /help
j = authNumber;
//bot->sendMessage(chat_id, "You have been registered!", "");
}
}
}
}
if (is_auth) {
Serial.println("authorized");
if (text == "/logout") {
for (byte j = 0; j < authNumber; j++) {
if (chat_id == auth[j].id) {
auth[j].id = "";
EEPROM.write(100 + (42 * j), 255);
EEPROM.commit();
is_auth = 0;
j = authNumber;
}
}
bot->sendMessage(chat_id, "You have been unregistered!", "");
}
if (text == "/test") {
for (byte j = 0; j < authNumber; j++) {
if (auth[j].id != "") {
bot->sendMessage(auth[j].id, "Test Message", "");
}
}
}
if (text == "/admin_purge") {
for (byte j = 0; j < authNumber; j++) {
if (auth[j].id != "") {
bot->sendMessage(auth[j].id, "You have been unregistered!", "");
auth[j].id = "";
EEPROM.write(100 + (42 * j), 255);
is_auth = 0;
}
}
EEPROM.commit();
bot->sendMessage(chat_id, "All Admins have been unregistered!", "");
}
if (text == "/restart") {
bot->sendMessage(chat_id, "restarting", "");
delay(1000);
ESP.restart();//this only works if the esp has been restartet at least once manually (power|button)
delay(3000);
}
if (text == "/tech") {
msg = "demm_bot Statistics.\n";
msg += String(WiFi.SSID()) + ": " + String(WiFi.RSSI()) + " dBm\n";
msg += "IP address: " + WiFi.localIP().toString() + "\n";
if (mclient.connected()) {
msg += "MQTT connected to:\n" + String(conf.mqtt_server) + ":" + String(conf.mqtt_port) + "\n";
} else {
msg += "MQTT not connected\n";
}
msg += "Vin: " + String(vin[1]) + " mV\n";
msg += "Vin min: " + String(vin[0]) + " mV\n";
msg += "Vin max: " + String(vin[2]) + " mV\n";
msg += "uptime : " + String(millis() / (1000 * 60 * 60)) + " h\n\n";
msg += "Your alarm Thresholds:\n";
for (byte j = 0; j < authNumber; j++) {
if (chat_id == auth[j].id) {
if (auth[j].TD) {
msg += "T: " + String(auth[j].TT) + " °C (" + String(auth[j].TD) + ")\n";
}
if (auth[j].RHD) {
msg += "RH: " + String(auth[j].RHT) + " RH% (" + String(auth[j].RHD) + ")\n";
}
if (auth[j].luxD) {
msg += "lux: " + String(auth[j].luxT) + " lx (" + String(auth[j].luxD) + ")\n";
}
if (auth[j].vinD) {
msg += "vin: " + String(auth[j].vinT) + " mV (" + String(auth[j].vinD) + ")\n";
}
j = authNumber;
}
}
msg += "\nYou are Registered!\n";
msg += "This Chat ID is: " + chat_id + "\n";
msg += "Registered Chat IDs:\n";
for (byte j = 0; j < authNumber; j++) {
msg += auth[j].id + " ";
}
bot->sendMessage(chat_id, msg, "");
}
if ((text == "/status")) {
bot->sendMessage(chat_id, SState(), ""); //send status
}
if ((text == "/help") || (text == "/start")) {
//msg = "ESP sensor bot\n";
msg = "This is demm_bot.\n";
msg += "You are Registered!\n\n";
msg += "/help : Get this Message\n";
msg += "/status : Get Sensor Status\n";
msg += "/tech : Get Statistics\n";
msg += "/logout : Unregister\n";
msg += "/test : Get Test Messages\n\n";
msg += "Threshold Notifications:\n";
msg += "/alarm_T_ : Temperature\n";
msg += "/alarm_RH_ : Humidity\n";
msg += "/alarm_lux_ : Luminance\n";
msg += "/alarm_V_ : Supply Voltage\n";
msg += "eg: /alarm_RH_40\n";
bot->sendMessage(chat_id, msg, "");
}
if (text.startsWith("/alarm_T_")) {
for (byte j = 0; j < authNumber; j++) {
if (chat_id == auth[j].id) {
if (text.substring(9) != "") {
auth[j].TT = text.substring(9).toFloat();
if (auth[j].TT > temperature[1]) {
auth[j].TD = 2;
msg = "I will notify you once the Temperature increases to:\n";
} else {
auth[j].TD = 1;
msg = "I will notify you once the Temperature drops to:\n";
}
msg += String(auth[j].TT) + " °C";
bot->sendMessage(chat_id, msg, "");
} else {
auth[j].TD = 0;
msg = "Alarm deactivated";
bot->sendMessage(chat_id, msg, "");
}
EEPROM.put(100 + (42 * j) + 17, auth[j].TT);
EEPROM.put(100 + (42 * j) + 21, auth[j].TD);
EEPROM.commit();
j = authNumber;
}
}
}
if (text.startsWith("/alarm_RH_")) {
for (byte j = 0; j < authNumber; j++) {
if (chat_id == auth[j].id) {
if (text.substring(10) != "") {
auth[j].RHT = text.substring(10).toFloat();
if (auth[j].RHT > humidity[1]) {
auth[j].RHD = 2;
msg = "I will notify you once the Humidity increases to:\n";
} else {
auth[j].RHD = 1;
msg = "I will notify you once the Humidity drops to:\n";
}
msg += String(auth[j].RHT) + " RH%";
bot->sendMessage(chat_id, msg, "");
} else {
auth[j].RHD = 0;
msg = "Alarm deactivated";
bot->sendMessage(chat_id, msg, "");
}
EEPROM.put(100 + (42 * j) + 22, auth[j].RHT);
EEPROM.put(100 + (42 * j) + 26, auth[j].RHD);
EEPROM.commit();
j = authNumber;
}
}
}
if (text.startsWith("/alarm_lux_")) {
for (byte j = 0; j < authNumber; j++) {
if (chat_id == auth[j].id) {
if (text.substring(11) != "") {
auth[j].luxT = text.substring(11).toFloat();
if (auth[j].luxT > luminance[1]) {
auth[j].luxD = 2;
msg = "I will notify you once the Luminance increases to:\n";
} else {
auth[j].luxD = 1;
msg = "I will notify you once the Luminance drops to:\n";
}
msg += String(auth[j].luxT) + " lx";
bot->sendMessage(chat_id, msg, "");
} else {
auth[j].luxD = 0;
msg = "Alarm deactivated";
bot->sendMessage(chat_id, msg, "");
}
EEPROM.put(100 + (42 * j) + 27, auth[j].luxT);
EEPROM.put(100 + (42 * j) + 31, auth[j].luxD);
EEPROM.commit();
j = authNumber;
}
}
}
if (text.startsWith("/alarm_V_")) {
for (byte j = 0; j < authNumber; j++) {
if (chat_id == auth[j].id) {
if (text.substring(9) != "") {
auth[j].vinT = text.substring(9).toFloat();
if (auth[j].vinT > vin[1]) {
auth[j].vinD = 2;
msg = "I will notify you once the Supply Voltage increases to:\n";
} else {
auth[j].vinD = 1;
msg = "I will notify you once the Supply Voltage drops to:\n";
}
msg += String(auth[j].vinT) + " mV";
bot->sendMessage(chat_id, msg, "");
} else {
auth[j].vinD = 0;
msg = "Alarm deactivated";
bot->sendMessage(chat_id, msg, "");
}
EEPROM.put(100 + (42 * j) + 32, auth[j].vinT);
EEPROM.put(100 + (42 * j) + 36, auth[j].vinD);
EEPROM.commit();
j = authNumber;
}
}
}
}
if (text == "/test") {
for (int i = 0; i < 5; i++) {
bot->sendMessage(chat_id, "test", "");
delay(0);
}
}
}
}
String SState() {
//String msg = "ESP sensor bot\n";
String msg = "This is demm_bot.\n";
msg += "Temperature: " + String(temperature[1]) + " °C\n";
msg += "Relative Humidity: " + String(humidity[1]) + " RH%\n";
msg += "Light luminance: " + String(luminance[1]) + " lx\n";
msg += "Min:\n" + String(temperature[0]) + "°C " + String(humidity[0]) + "RH% " + String(luminance[0]) + "lx\n";
msg += "Max:\n" + String(temperature[2]) + "°C " + String(humidity[2]) + "RH% " + String(luminance[2]) + "lx\n";
return msg;
}
void loop() {
String msg;
if (!mclient.connected()) {
//throw error but continue
if (millis() – lastMC > 15000) {
lastMC = millis();
// Attempt to reconnect
if (reconnect()) {
lastMC = 0;
}
else {
Serial.print("failed, rc=");
Serial.print(mclient.state());
Serial.println(" trying again in 15 seconds");
}
}
} else {
// Client connected
mclient.loop();
}
if ((millis() – lastLTH) > LTH_INTERVAL) {
lastLTH = millis();
preReq++;
Serial.print("lt");
getlux();
getdht();
vin[1] = analogRead(A0) * 5.546;
//min max storage
if (luminance[1] < luminance[0]) {
luminance[0] = luminance[1];
}
if (luminance[1] > luminance[2]) {
luminance[2] = luminance[1];
}
if (temperature[1] < temperature[0]) {
temperature[0] = temperature[1];
}
if (temperature[1] > temperature[2]) {
temperature[2] = temperature[1];
}
if (humidity[1] < humidity[0]) {
humidity[0] = humidity[1];
}
if (humidity[1] > humidity[2]) {
humidity[2] = humidity[1];
}
if (vin[1] < vin[0]) {
vin[0] = vin[1];
}
if (vin[1] > vin[2]) {
vin[2] = vin[1];
}
Serial.print("h ");
//low voltage alarm
if ((vin[1] < lowvoltage) && (!lowvoltagesent)) {
lowvoltagesent = 1;
for (byte j = 0; j < authNumber; j++) {
if (auth[j].id != "") {
msg = "Low Supply Voltage:\n";
msg += String(vin[1]) + " mV\n";
bot->sendMessage(auth[j].id, msg, "");
//bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
}
//alarm notifications
for (byte j = 0; j < authNumber; j++) {
//user threshold alarms
if (auth[j].TD == 2) {
if (auth[j].TT < temperature[1]) {
auth[j].TD = 0;
EEPROM.write(100 + (42 * j) + 21, 0);
EEPROM.commit();
msg = "The Temperature reached:\n";
msg += String(auth[j].TT) + " °C\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].TD == 1) {
if (auth[j].TT > temperature[1]) {
auth[j].TD = 0;
EEPROM.write(100 + (42 * j) + 21, 0);
EEPROM.commit();
msg = "The Temperature reached:\n";
msg += String(auth[j].TT) + " °C\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].RHD == 2) {
if (auth[j].RHT < humidity[1]) {
auth[j].RHD = 0;
EEPROM.write(100 + (42 * j) + 26, 0);
EEPROM.commit();
msg = "The Humidity reached:\n";
msg += String(auth[j].RHT) + " RH%\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].RHD == 1) {
if (auth[j].RHT > humidity[1]) {
auth[j].RHD = 0;
EEPROM.write(100 + (42 * j) + 26, 0);
EEPROM.commit();
msg = "The Humidity reached:\n";
msg += String(auth[j].RHT) + " RH%\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].luxD == 2) {
if (auth[j].luxT < luminance[1]) {
auth[j].luxD = 0;
EEPROM.write(100 + (42 * j) + 31, 0);
EEPROM.commit();
msg = "The Luminance reached:\n";
msg += String(auth[j].luxT) + " lx\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].luxD == 1) {
if (auth[j].luxT > luminance[1]) {
auth[j].luxD = 0;
EEPROM.write(100 + (42 * j) + 31, 0);
EEPROM.commit();
msg = "The Luminance reached:\n";
msg += String(auth[j].luxT) + " lx\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].vinD == 2) {
if (auth[j].vinT < vin[1]) {
auth[j].vinD = 0;
EEPROM.write(100 + (42 * j) + 36, 0);
EEPROM.commit();
msg = "The Supply Voltage reached:\n";
msg += String(auth[j].vinT) + " mV\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
if (auth[j].vinD == 1) {
if (auth[j].vinT > vin[1]) {
auth[j].vinD = 0;
EEPROM.write(100 + (42 * j) + 36, 0);
EEPROM.commit();
msg = "The Supply Voltage reached:\n";
msg += String(auth[j].vinT) + " mV\n";
bot->sendMessage(auth[j].id, msg, "");
bot->sendMessage(auth[j].id, SState(), ""); //send status
}
}
}
}
if (((millis() – lastMQTT) > MQTT_INTERVAL) && (preReq >= 2)) { //
lastMQTT = millis();
preReq = 0;
//Serial.println("Ambient Light luminance: "+String(luminance[1])+" lx");
//Serial.print("DHT22 Values: ");
//Serial.print((float)temperature[1]); Serial.print(" °C, ");
//Serial.print((float)humidity[1]); Serial.println(" RH%");
//Serial.println("Vin: "+String(vin[1])+"mV");
if (mclient.connected()) {
Serial.println("MQTT Publish");
updateID++;
msg = String(updateID);
mclient.publish("demm_bot/updateID", msg.c_str());
msg = String(luminance[1]);
mclient.publish("demm_bot/lux", msg.c_str());
msg = String(temperature[1]);
mclient.publish("demm_bot/T", msg.c_str());
msg = String(humidity[1]);
mclient.publish("demm_bot/RH", msg.c_str());
msg = String(vin[1]);
mclient.publish("demm_bot/vin", msg.c_str());
}
else {
Serial.println("MQTT not connected!");
}
}
if (millis() > lastBOT + Bot_mtbs) {
int numNewMessages = bot->getUpdates(bot->last_message_received + 1);
while (numNewMessages) {
Serial.println("got response");
handleNewMessages(numNewMessages);
numNewMessages = bot->getUpdates(bot->last_message_received + 1);
}
lastBOT = millis();
}
//check for millis overflow
if (millis() < lastMQTT) {
lastMQTT = millis();
}
if (millis() < lastLTH) {
lastLTH = millis();
}
if (millis() < lastMC) {
lastMC = millis();
}
if (millis() < lastBOT) {
lastBOT = millis();
}
/*
if(!digitalRead(EN_deepsleep)){
Serial.print("DS ");
delay(1000);
//delay(2000);
ESP.deepSleep(1000000);
delay(1000);
}*/
}
[/code]