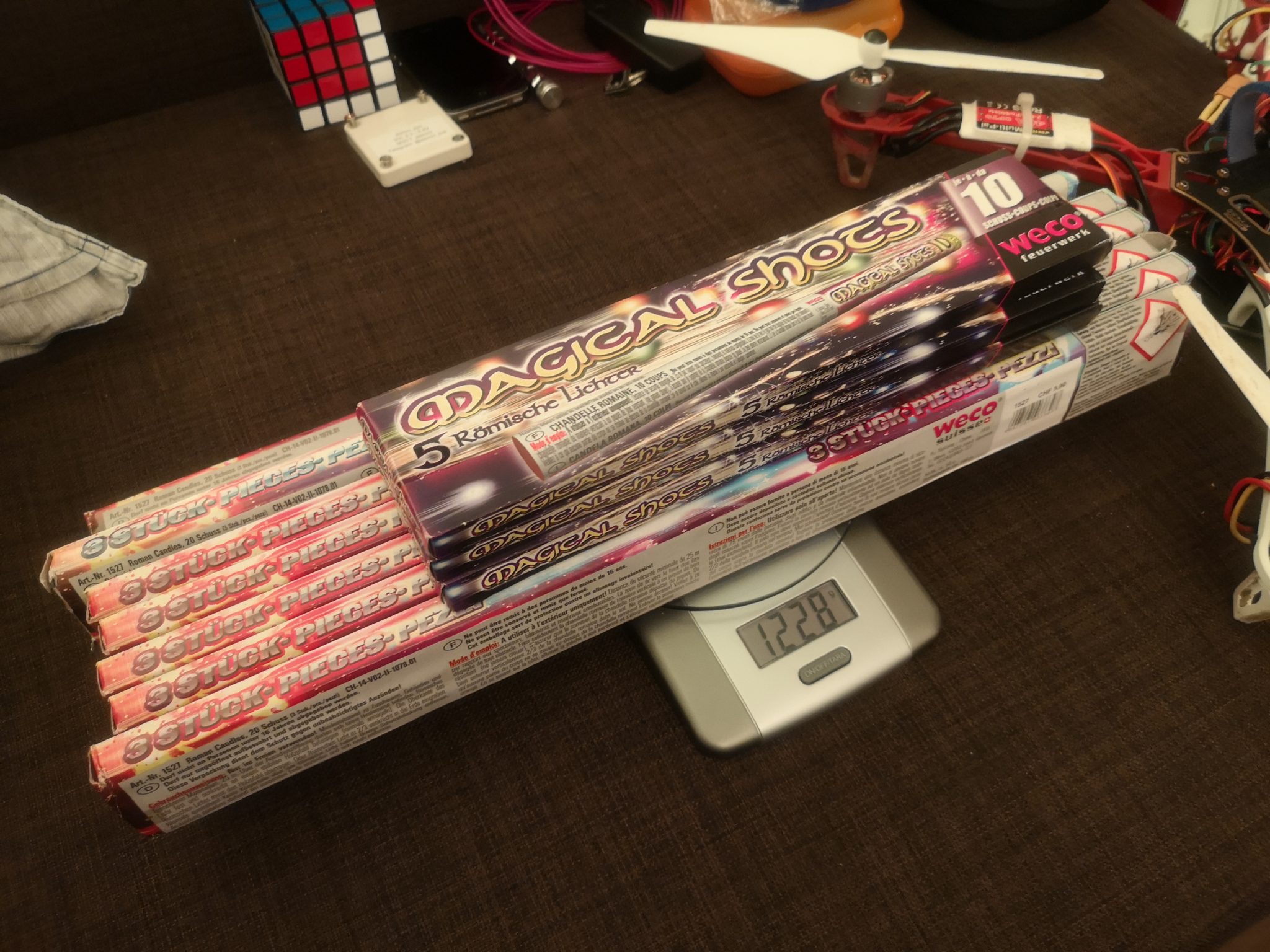
1.2kg of fireworks on a FY-450 4S quadcopter
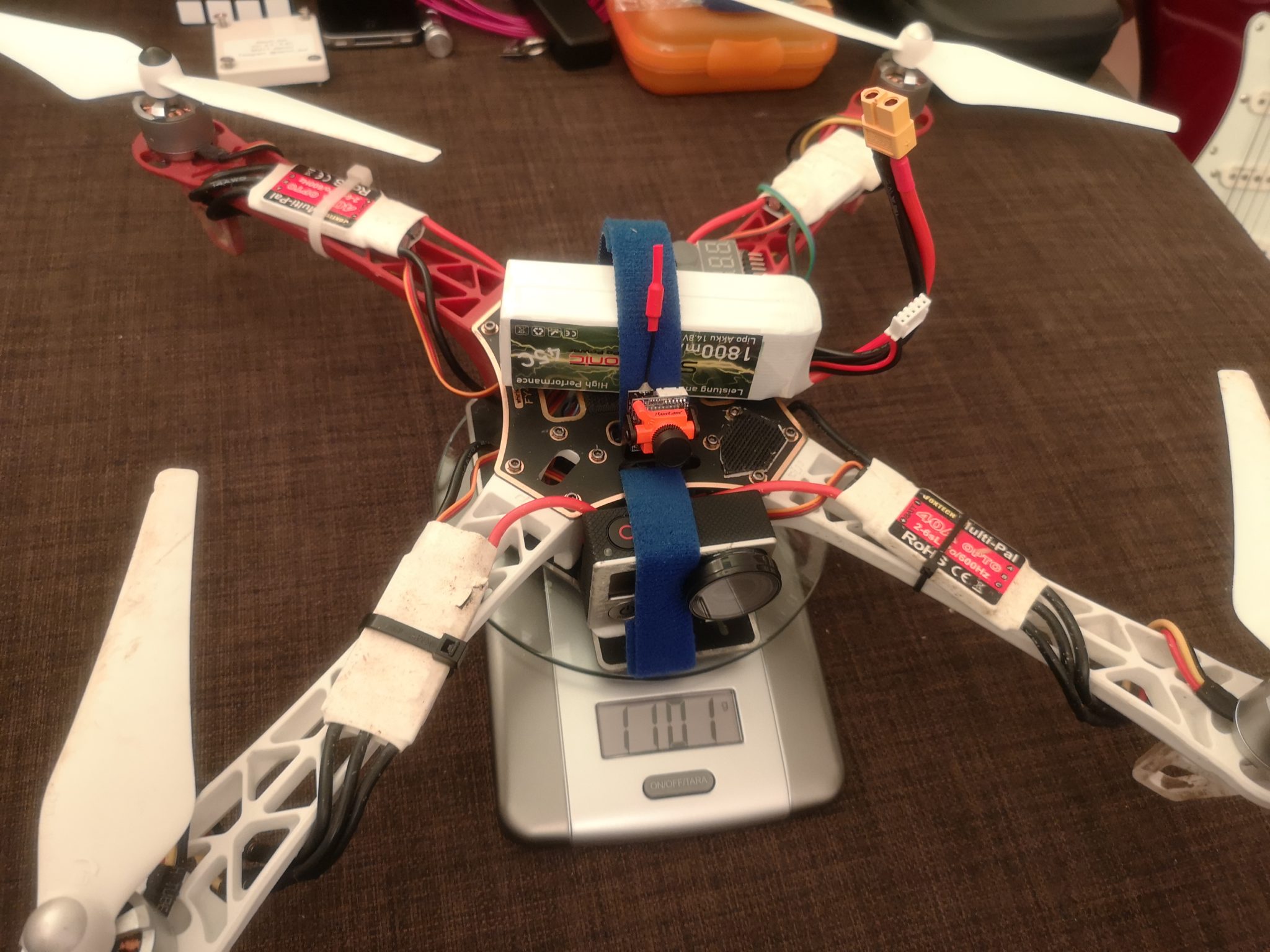






immediately after takeoff the quad crashes despite being at full throttle. set off by either turbulences or too aggressive remote input, the additional weight causes the PID feedback loop of the CC3D Flight Controller to visibly oscillate, constantly trying to level the quad causing a significant drop in overall lift. if the control loop would have gotten calibrated, the flight would have probably been a success.
